
Este es el enlace donde explica paso por paso como soldar la placa:
El tutorial no da lugar a confusión pero yo voy a remarcar un par de pasos por si no quedan claros:
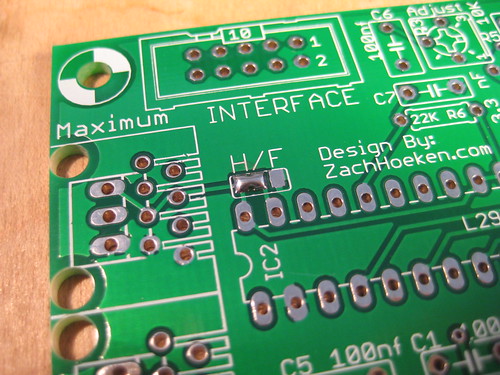
1) Hay que soldar la H:
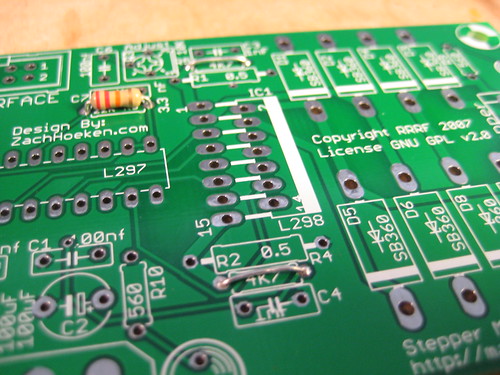
2) R4,R5 hay que poner un "puente", para ello he utilizado las patas cortadas a la resistencia R6 del paso anterior.
Para poder comprobar que la placa funciona hemos seguido los pasos de
donde se explica como testear la Stepper motor driver 1.2 con una placa ARDUINO.
Como yo lo que tengo es una placa SANGUINO (REPRAP MotherBoard 1.2) he tenido que irme al tutorial del Stepper motor driver 2.3
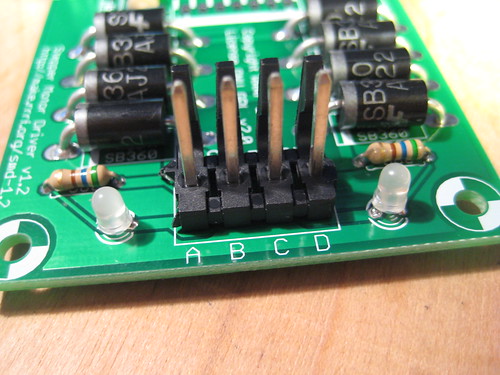
Para poder comprobar que funciona hemos tenido que conectar uno de los motores Keling_KL23H51_24_08B
Recordar, los cables del motor:
Rojo y Amarillo los soldamos.
Negro y Naranja los soldamos.
Conector A - Cable Azul
Conector B - Cable Verde
Conector C - Cable Marron
Conector D - Cable Blanco
Por cierto el conector viene en el KIT de la placa.
En otro post explicaré paso por paso como realizar el test a la placa.
Saludos!
No hay comentarios:
Publicar un comentario